隨著人工智能、傳感器和計算技術(shù)的飛速發(fā)展,自動駕駛技術(shù)正逐步從實驗室走向現(xiàn)實道路。其中,L4級(高度自動駕駛)作為實現(xiàn)完全自動駕駛前的關(guān)鍵階段,已成為全球科技企業(yè)和汽車制造商競相布局的焦點(diǎn)。本報告基于艾瑞咨詢的行業(yè)研究,旨在系統(tǒng)梳理L4級自動駕駛的核心技術(shù)、發(fā)展現(xiàn)狀及其多元化的應(yīng)用場景。
一、L4級自動駕駛技術(shù)概述
L4級自動駕駛,依據(jù)國際自動機(jī)工程師學(xué)會(SAE)的定義,是指在特定設(shè)計運(yùn)行域(ODD)內(nèi),車輛能夠完成所有動態(tài)駕駛?cè)蝿?wù),無需人類駕駛員干預(yù)。其核心特征在于系統(tǒng)的冗余性與可靠性——當(dāng)系統(tǒng)無法繼續(xù)執(zhí)行任務(wù)時,能實現(xiàn)最小風(fēng)險狀態(tài)(如安全靠邊停車),而非要求人類接管。這標(biāo)志著駕駛責(zé)任從“人”向“機(jī)器”的根本性轉(zhuǎn)移。
二、核心技術(shù)與實現(xiàn)路徑
L4級自動駕駛的實現(xiàn)依賴于復(fù)雜的技術(shù)矩陣,主要包括:
- 環(huán)境感知層:融合激光雷達(dá)、毫米波雷達(dá)、攝像頭、超聲波雷達(dá)等多源傳感器,構(gòu)建車輛周圍360度、高精度的實時三維感知。其中,固態(tài)激光雷達(dá)的成本下降與性能提升,以及基于深度學(xué)習(xí)的視覺感知算法的成熟,是近年來的關(guān)鍵突破。
- 決策規(guī)劃層:基于高精度地圖、實時交通信息及感知數(shù)據(jù),運(yùn)用強(qiáng)化學(xué)習(xí)、預(yù)測模型等AI算法,進(jìn)行路徑規(guī)劃、行為決策和運(yùn)動控制。這一層的核心挑戰(zhàn)在于處理復(fù)雜的“長尾場景”(即罕見但危險的交通狀況)。
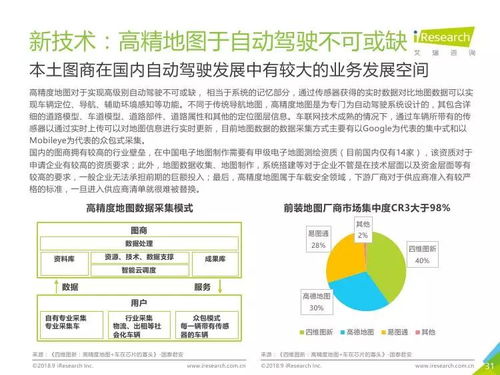
- 高精度定位與地圖:結(jié)合GNSS(全球?qū)Ш叫l(wèi)星系統(tǒng))、IMU(慣性測量單元)及視覺定位,實現(xiàn)厘米級定位。高精度地圖不僅提供先驗道路信息,更是安全冗余的重要保障。
- 車路協(xié)同(V2X):通過車輛與道路基礎(chǔ)設(shè)施、其他車輛及云端的信息交互,擴(kuò)展單車智能的感知邊界,提升系統(tǒng)整體的安全性與通行效率,被視為L4規(guī)模化落地的重要助推器。
- 算力平臺與軟件架構(gòu):車載高性能計算平臺(如NVIDIA DRIVE Orin、華為MDC)提供所需的巨大算力。面向服務(wù)的軟件架構(gòu)(如AUTOSAR Adaptive)確保了系統(tǒng)的靈活性、可升級性與安全性。
三、主要應(yīng)用場景分析
L4技術(shù)的商業(yè)化落地并非一蹴而就,而是遵循從封閉/半封閉場景到開放道路,從載貨到載人的漸進(jìn)路徑。當(dāng)前,其應(yīng)用主要集中在以下幾個高價值場景:
- RoboTaxi/RoboBus(自動駕駛出租車/巴士):在劃定區(qū)域(如城市新區(qū)、機(jī)場、公園)提供點(diǎn)到點(diǎn)的客運(yùn)服務(wù)。Waymo、Cruise、百度Apollo、小馬智行等在中美多地已開展常態(tài)化收費(fèi)運(yùn)營。其商業(yè)模式正從技術(shù)驗證轉(zhuǎn)向追求單位經(jīng)濟(jì)效益。
- 干線物流與無人卡車:在高速公路等結(jié)構(gòu)化道路上進(jìn)行貨物的長途運(yùn)輸。該場景ODD相對明確,能有效解決貨運(yùn)行業(yè)司機(jī)短缺、疲勞駕駛等痛點(diǎn),商業(yè)價值清晰。圖森未來、智加科技等是該領(lǐng)域的代表企業(yè)。
- 末端配送與無人環(huán)衛(wèi):包括無人配送車、無人清掃車等。在校園、園區(qū)、社區(qū)等低速封閉場景中,技術(shù)已相對成熟并開始規(guī)模化部署,顯著降低了人力成本。
- 封閉場景運(yùn)輸:如港口、礦山、廠區(qū)內(nèi)的集裝箱轉(zhuǎn)運(yùn)、礦石運(yùn)輸?shù)取-h(huán)境完全可控,是實現(xiàn)L4技術(shù)商業(yè)閉環(huán)的最快領(lǐng)域,已有眾多解決方案提供商落地。
- 特定功能服務(wù):如自動代客泊車(AVP),在停車場內(nèi)實現(xiàn)車輛的自動召喚與停放,為用戶提供“最后一公里”的便利。
四、挑戰(zhàn)與展望
盡管前景廣闊,L4級自動駕駛的全面普及仍面臨多重挑戰(zhàn):
- 技術(shù)層面:極端天氣、復(fù)雜城市交通交互等“長尾問題”的徹底解決仍需時間。
- 法規(guī)與標(biāo)準(zhǔn):全球范圍內(nèi)的道路交通安全法規(guī)、產(chǎn)品責(zé)任認(rèn)定、保險體系等尚待完善。
- 成本與基礎(chǔ)設(shè)施:傳感器、計算平臺的成本仍需進(jìn)一步降低,車路協(xié)同基礎(chǔ)設(shè)施的建設(shè)需要大規(guī)模投資。
- 社會接受度:公眾對機(jī)器駕駛安全的信任需要長期培育。
L4級自動駕駛的發(fā)展將呈現(xiàn)“場景驅(qū)動、梯次落地”的特點(diǎn)。隨著技術(shù)迭代、法規(guī)破冰和生態(tài)協(xié)同,預(yù)計在未來5-10年內(nèi),限定場景下的L4應(yīng)用將率先實現(xiàn)規(guī)模化商業(yè)運(yùn)營,并逐步向更復(fù)雜的開放道路滲透,最終深刻變革人類的出行與物流模式,開啟智能交通的新紀(jì)元。